
1. Puntuzko makina zirkularraren teknologiaren aurkezpena
1. Puntuzko makina zirkularraren aurkezpen laburra
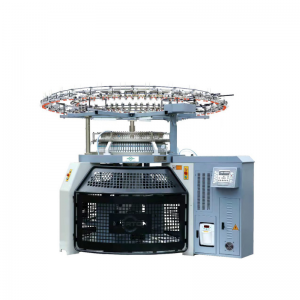
Puntuzko ehundura zirkularreko makina (1. irudian erakusten den bezala) kotoizko haria ehun hodi bihurtzen duen gailua da. Batez ere, ehundura erliebedun mota desberdinak, kamiseta-oihalak, zulodun ehundura eredudunak eta abar ehuntzeko erabiltzen da. Egituraren arabera, ehundura zirkularreko makina bakarrean eta ehundura zirkularreko makina bikoitzean bana daiteke, eta hauek oso erabiliak dira ehungintza-industrian.
 2. Prozesuaren eskakizunak
2. Prozesuaren eskakizunak
(1) Inbertsoreak ingurumenarekiko erresistentzia handia izan behar du, lan-ingurunearen tenperatura nahiko altua baita, eta kotoiak hozte-haizagailua erraz gelditu eta kaltetu dezakeelako, eta hozte-zuloak blokeatu.
(2) Martxan jartzeko funtzio malgua behar da. Martxan jartzeko botoiak ekipamenduaren leku askotan instalatuta daude, eta inbertsoreak azkar erantzun behar du.
(3) Abiadura-kontrolean hiru abiadura behar dira. Bata, pixkanaka aurrera egiteko abiadura da, normalean 6Hz ingurukoa; bestea, ehuntzeko abiadura normala da, maiztasun handiena 70Hz-raino iristen dena; hirugarrena, abiadura txikiko bilketa-eragiketa da, 20Hz inguruko maiztasuna behar duena.
(4) Puntuzko makina zirkularraren funtzionamenduan zehar, motorraren alderantzikatzea eta biratzea guztiz debekatuta daude, bestela orratz-oheko orratzak tolestu edo hautsi egingo dira. Puntuzko makina zirkularrak errodamendu monofasikoa erabiltzen badu, hau ez da kontuan hartuko. Sistemak aurrera eta atzera biratzen badu, motorraren aurrera eta atzerako biraketaren araberakoa da erabat. Alde batetik, alderantzizko biraketa debekatu ahal izan behar du, eta bestetik, korronte zuzeneko balazta konfiguratu behar du biraketa ezabatzeko.
3. Errendimendu-eskakizunak
Ehunduz gero, karga handia da, eta abiarazte/martxatze prozesua azkarra izan behar da, eta horrek inbertsoreak maiztasun baxua, momentu handia eta erantzun-abiadura azkarra izan behar ditu. Maiztasun-bihurgailuak bektore-kontrol modua erabiltzen du motorraren abiaduraren egonkortze-zehaztasuna eta maiztasun baxuko momentu-irteera hobetzeko.
4. Kontrol kableatua
Puntuzko puntuzko makina zirkularraren kontrol-atalak mikrokontrolagailu edo PLC + gizaki-makina interfazearen kontrola erabiltzen du. Maiztasun-bihurgailua terminalen bidez kontrolatzen da abiarazteko eta gelditzeko, eta maiztasuna kantitate analogiko edo etapa anitzeko maiztasun-ezarpenaren bidez ematen da.
Funtsean, bi kontrol-eskema daude abiadura anitzeko kontrolerako. Bata analogikoa erabiltzea da maiztasuna ezartzeko. Jogging edo abiadura handiko eta abiadura txikiko funtzionamendua izan, seinale analogikoa eta funtzionamendu-argibideak kontrol-sistemak ematen ditu; bestea maiztasun-bihurgailu bat erabiltzea da. Barneko etapa anitzeko maiztasun-ezarpenarekin, kontrol-sistemak etapa anitzeko maiztasun-kommutazio-seinalea ematen du, jogging-a inbertsoreak berak ematen du, eta abiadura handiko ehundura-maiztasuna inbertsorearen kantitate analogikoaren edo ezarpen digitalaren bidez ematen da.
2. Tokiko eskakizunak eta martxan jartzeko plana
(1) Tokiko eskakizunak
Puntuzko makina zirkularraren industriak inbertsorearen kontrol funtzioari buruzko eskakizun nahiko sinpleak ditu. Oro har, terminaletara konektatzen da abiaraztea eta gelditzea kontrolatzeko, maiztasun analogikoa ematen da edo abiadura anitzekoa erabiltzen da maiztasuna ezartzeko. Aurrerapen moteleko edo abiadura txikiko funtzionamendua azkarra izan behar da, beraz, inbertsoreak motorra kontrolatu behar du maiztasun txikiko momentu handia sortzeko maiztasun baxuan. Oro har, puntuzko makina zirkularraren aplikazioan, maiztasun bihurgailuaren V/F modua nahikoa da.
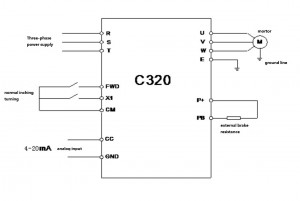
(2) Arazketa-eskema Hartzen dugun eskema hau da: C320 serieko sentsorerik gabeko korronte-bektore inbertsore Potentzia: 3,7 eta 5,5 KW
3. Parametroak eta argibideak araztea
1. Kableatu diagrama
2. Arazketa-parametroen ezarpena
(1) F0.0=0 VF modua
(2) F0.1=6 maiztasun sarrera kanal kanpoko korronte seinalea
(3) F0.4=0001 Kanpoko terminalaren kontrola
(4) F0.6=0010 alderantzizko biraketa saihestea baliozkoa da
(5) F0.10=5 azelerazio denbora 5S
(6) F0.11=0.8 dezelerazio denbora 0.8S
(7) F0.16=6 eramaile-maiztasuna 6K
(8) F1.1=4 Momentuaren igoera 4
(9) F3.0=6 Ezarri X1 aurreranzko mugimenduan
(10) F4.10=6-k jog maiztasuna 6HZ-ra ezarri du
(11) F4.21=3.5 Ezarri jog azelerazio denbora 3.5S-tan
(12) F4.22=1.5-ek jog dezelerazio-denbora 1.5S-ra ezartzen du
Arazketa-oharrak
(1) Lehenik eta behin, mugitu motorraren norabidea zehazteko.
(2) Jogging-ean bibrazio eta erantzun motelaren arazoei dagokienez, jogging-aren azelerazio eta dezelerazio denbora beharren arabera egokitu behar da.
(3) Maiztasun baxuko momentua hobetu daiteke eramaile-uhina eta momentu-bultzada doitzen.
(4) Kotoiak aire-hodia blokeatzen du eta haizagailua gelditzen da, inbertsorearen beroa gaizki xahutuz. Egoera hau maiz gertatzen da. Gaur egun, inbertsore orokorrak alarma termikoa saltatzen du eta gero eskuz kentzen du aire-hodiko lint-a erabiltzen jarraitu aurretik.
Argitaratze data: 2023ko irailaren 8a